@article{chen2023visual,
author = {Tao Chen and Megha Tippur and Siyang Wu and Vikash Kumar and Edward Adelson and Pulkit Agrawal },
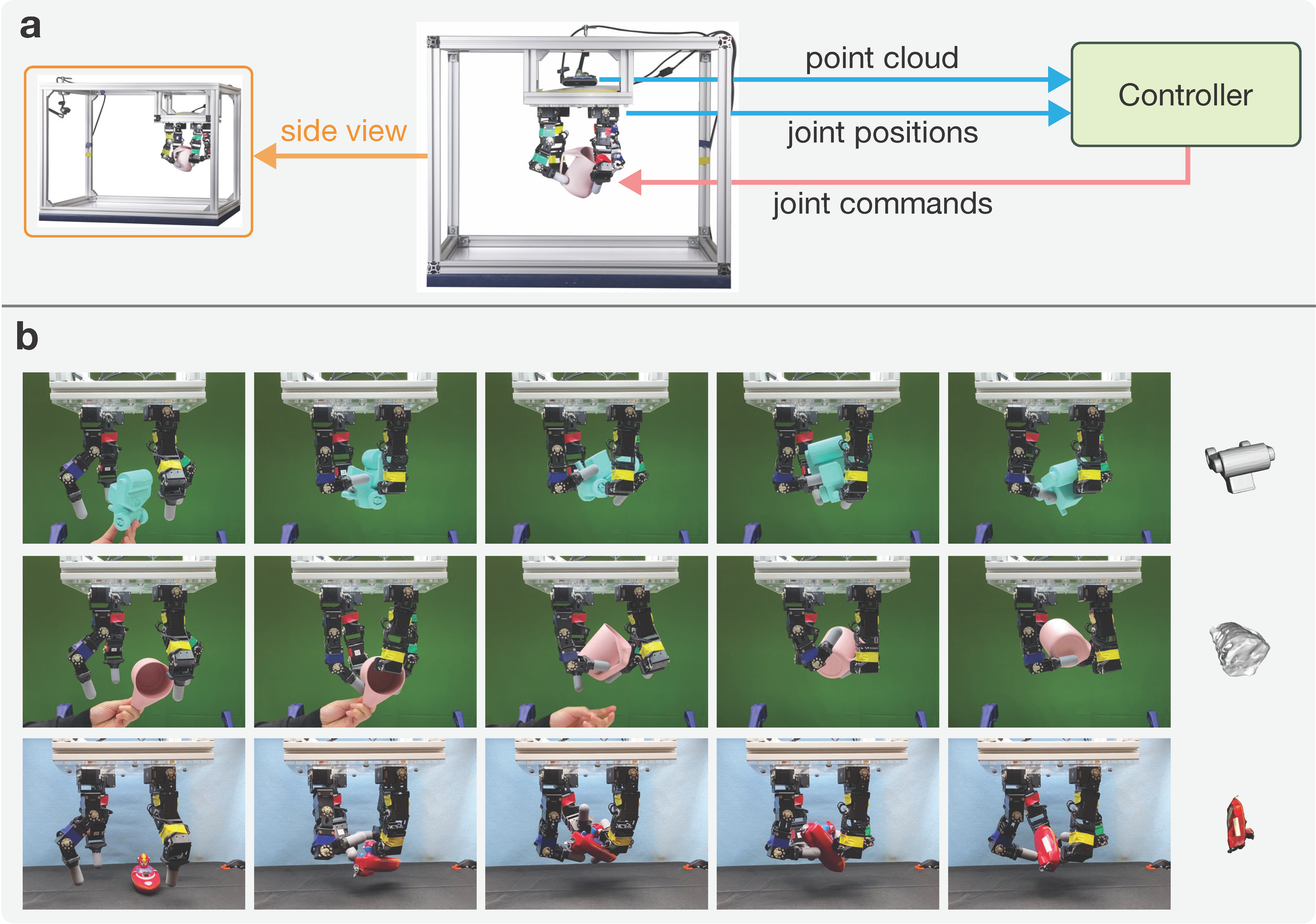
title = {Visual dexterity: In-hand reorientation of novel and complex object shapes},
journal = {Science Robotics},
volume = {8},
number = {84},
pages = {eadc9244},
year = {2023},
doi = {10.1126/scirobotics.adc9244},
URL = {https://www.science.org/doi/abs/10.1126/scirobotics.adc9244},
eprint = {https://www.science.org/doi/pdf/10.1126/scirobotics.adc9244},
}