Computer Science and Artificial Intelligence Laboratory (CSAIL)
Massachusetts Institute of Technology
Abstract
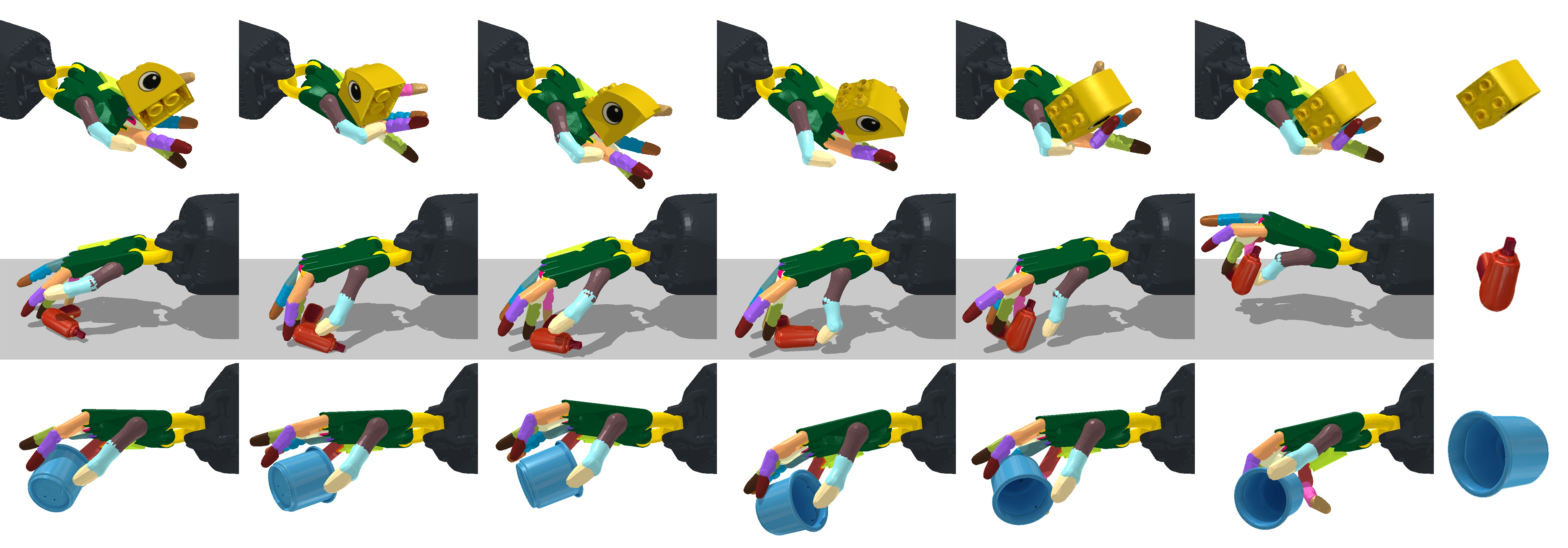
In-hand object reorientation has been a challenging problem in robotics due to high dimensional actuation space and the frequent change in contact state between the fingers and the objects. We present a simple model-free framework that can learn to reorient
objects with both the hand facing upwards and downwards. We demonstrate the capability of reorienting over 2000 geometrically different objects in both cases. The learned policies show strong zero-shot transfer performance on new objects.
We provide evidence that these policies are amenable to real-world operation by distilling them to use observations easily available in the real world.
@article{chen2021system,
title={A System for General In-Hand Object Re-Orientation},
author={Chen, Tao and Xu, Jie and Agrawal, Pulkit},
journal={Conference on Robot Learning},
year={2021}
}